State observer sensorless algorithm
Preface
The State Observer Sensorless Algorithm is the method used by ST’s SDK. Here, we will delve into the Observer + PLL algorithm to correspond with the parameters that need to be adjusted in the ST MCSDK, enabling faster and more accurate completion of tasks. The reference material is ST MCSDK version 6.3.0.Among the various sensorless motor control methods, this time we will focus only on the State Observer.

Mathematical Model of Permanent Magnet Synchronous Motor
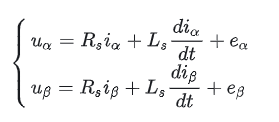
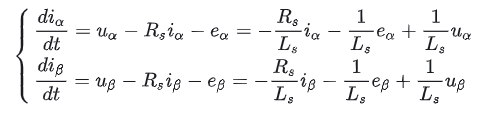
The general expression of the voltage equation for a Permanent Magnet Synchronous Motor (PMSM) in the α-β reference frame is given below.
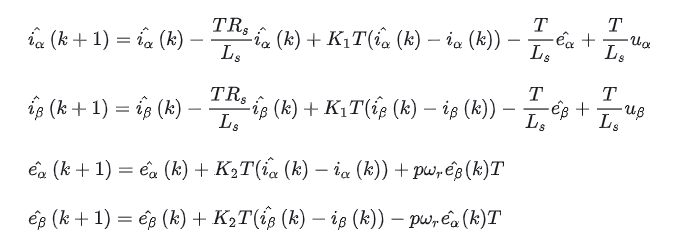
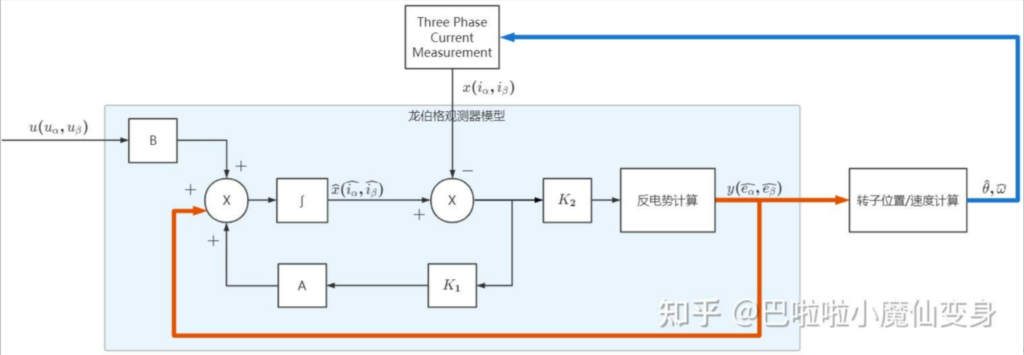
The discretization of the Luenberger observer, assuming a sampling time T, results in the observer shown in the right diagram.
Phase-Locked Loop (PLL)
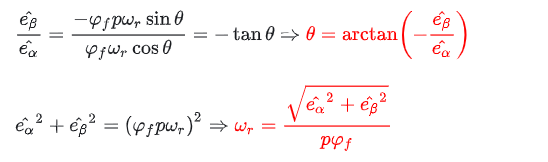
The estimated back-EMF values calculated above can be used to determine the position and speed directly through the arctangent function, as follows:

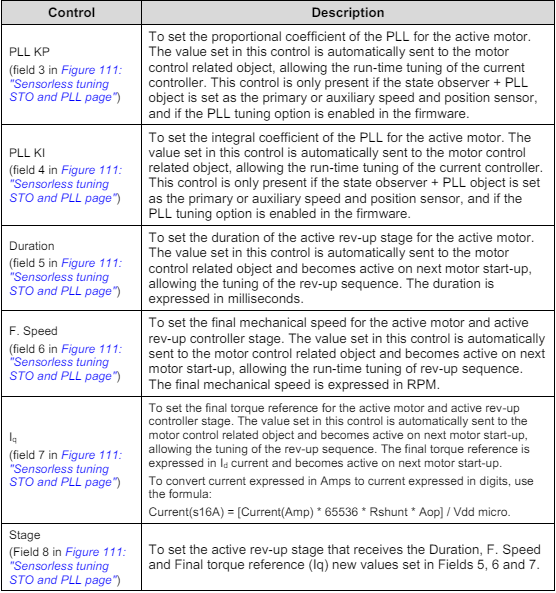
Sensorless tuning STO & PLL page
A comparison table for the ST parameters is shown below: